Segmental Retaining Wall Global Stability
INTRODUCTION
The general mass movement of a segmental retaining wall (SRW) structure and the adjacent soil is called global stability failure. Global stability analysis is an important component of SRW design, particularly under the following conditions:
- groundwater table is above or within the wall height of the SRW,
- a 3H:1V or steeper slope at the toe or top of the SRW,
- for tiered SRWs,
- for excessive surcharges above the wall top,
- for seismic design, and
- when the geotechnical subsurface exploration finds soft soils, organic soils, peat, high plasticity clay, swelling or shrinking soils or fill soil.
The designer should also review local code requirements applicable to designing soil retention structures.
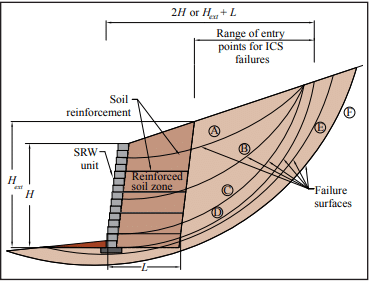
There are two primary modes of global stability failure: deep-seated and compound. A deep-seated failure is characterized by a failure surface that starts in front of an SRW, passes below the base of the wall and extends beyond the tail of the geosynthetic reinforcement (see Figure 1, surface F).
Compound failures are typically described by a failure surface that passes either through the SRW face or in front of the wall, through the reinforced soil zone and continues into the unreinforced/retained soil (Fig. 1, surfaces A through E). A special case of the compound failure is the Internal Compound Stability (ICS) failure surface that exits at the SRW face above the foundation soil (Fig. 1, surfaces A through D).
GLOBAL STABILITY ANALYSIS
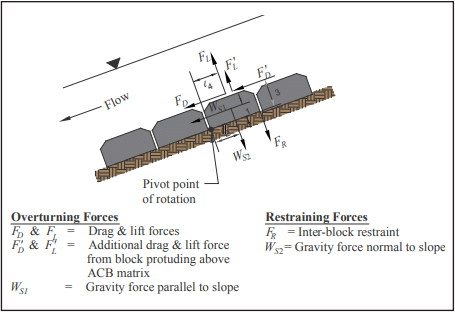
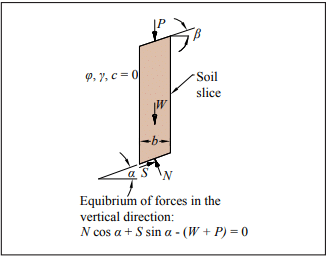
Several methods of analysis (such as Janbu, Spencer and Bishop) have been developed to analyze the global stability in a soil mass. The Bishop’s method is the most commonly used. It models a group of slices and the forces acting on each slice as shown in Figure 2. Limit equilibrium requirements are applied to the slices comprising the soil structure. The factor of safety against sliding is defined as the ratio of the maximum shear possessed by the soil on the trial failure surface plus contributions from the soil reinforcement (τavailable) to the shear resistance developed along the potential failure surface (τmobilized), i.e.:
FS= τavailable/τmobilized or resistance/driving.
Limit equilibrium methods of analysis are typically used to determine the global stability of the SRW. These methods assume that the SRW, the retained soil, and the foundation soil will fail along a critical slip (failure) surface generated by the force of gravity. The critical slip surface is commonly assumed as a circular arc, logarithmic spiral arc, curve, single plane or multiple planes to simulate the possible sliding movement.
In most limit equilibrium analyses, the minimum shear strength required along a potential failure surface to maintain stability is calculated and then compared to the available shear strength of the soil. The factor of safety is assumed to be constant along the entire failure surface. The design factor of safety for global stability is typically between 1.3 and 1.5, and depends on the criticality of the structure and how well the site conditions are defined.
The global stability analysis is an iterative process where as many as 250 trial failure surfaces are assumed and analyzed to determine the critical failure surface (i.e. minimum factor of safety). For this reason, the slope stability analyses are usually performed using computer programs that implement one or more methods. Many software programs have been developed to analyze the global stability of unreinforced soil structures. There are, however, only a limited number of programs that include the stabilizing effects of the geosynthetic reinforcement used to construct a soil-reinforced SRW. ReSSA (ref. 1) is one of the specialized programs developed for the Federal Highway Administration.
Internal Compound Stability
Internal Compound Stability (ICS) affects the internal components of the retaining wall system, including the facing elements and reinforced zone. Because ICS is influenced by loading conditions outside the reinforced fill area, it is a special case of a larger compound analysis.
The CMHA Design Manual for Segmental Retaining Walls (ref. 3) provides specific guidelines for ICS analysis. The failure surfaces are evaluated by defining a range of possible entry points located behind the soil-reinforced SRW and exit points at the face of the wall. The entry points are located at a distance that is the larger of twice the wall height (2H) and the height of the projection from the tail of the reinforcement layers to the surface plus a distance equal to the length of the reinforcement (Hext + L) (see Figure 1).
To analyze the ICS failure on soil-reinforced SRWs, the components of the SRW (soil reinforcement and facing) are considered to help resist the unbalanced forces of the system:

To simplify the ICS analysis, CMHA has developed SRWall 4.0 Software (ref. 2).
Factors Affecting the Global Stability and Internal Compound Stability (ICS) of SRWs
The global factor of safety of an SRW is a function of: the soil characteristics, groundwater table location, site geometry (i.e., sloping toe or crest, tiered walls), and the length, strength and vertical location of soil reinforcement (geosynthetic). The effects of each of these are briefly discussed below.
Soil Characteristics—Weak foundation soils increase the potential for deep-seated stability problems. Low strength reinforced soil will contribute to compound stability problems and low strength retained soils may contribute to either deep-seated or compound failure modes.
Groundwater Table—If the groundwater table is shallow (i.e., close to the toe of the wall) the long-term shear strength (i.e., effective shear strength) of the foundation soil will be reduced. This reduction in strength is directly related to the buoyant effect of the groundwater. The effective weight of the soil is reduced by approximately 50%, which reduces the shear strength along the failure surface.
Geometry—A sloping toe at the bottom of an SRW reduces the resisting forces when analyzing failure surfaces exiting in front of the SRW (deep-seated or compound). As the resisting force decreases, the global factor of safety also decreases. The ICS does not evaluate the influence of front slopes on the stability of SRWs.
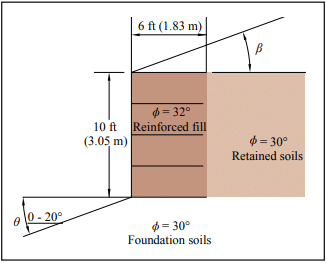
Figure 3 illustrates the design case for a parametric analysis with top and toe slopes condition for a 10-ft (3.05-m) high wall with a horizontal crest slope founded on a foundation soil with a friction angle of 30°.
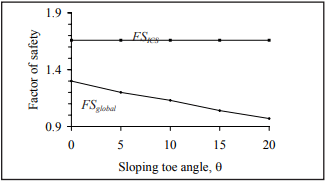
Figure 4 shows the change in factor of safety for deep-seated failure as a function of the toe slope angle. However, ICS analysis is not influenced by these changes and remains constant for the different toe variations.
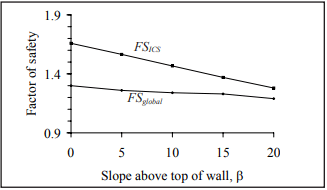
An increase of the slope above the wall decreases the SRW global stability factor of safety. Figure 5 shows the change in factor of safety for the design case used earlier (with the exception that the toe is level and the crest slope varies). In this case, evaluation of the wall with this geometry shows a larger reduction in safety factor for ICS than for global stability.
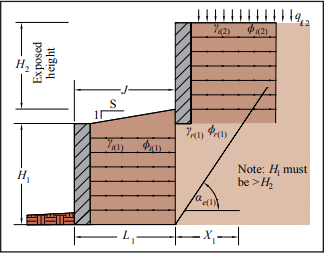
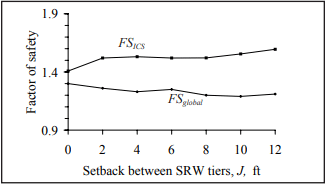
Tiered Walls—The CMHA Design Manual for Segmental Retaining Walls (ref. 3) provides specific guidelines for tiered SRWs with respect to the spacing between tiers and the effect of the upper wall on the internal and external stability of the lower wall (see Figure 6). When the setback of the upper wall, J, is greater than the height of the lower wall, H1, the internal design of the lower wall is not affected by the upper wall. However, this is not true for global stability. Global stability must be checked for all tiered walls.
Figure 7 shows the variation in the global factor of safety for two 10-ft (3.05-m) high tiered walls with horizontal crest slopes as a function of the setback J. In this example, the reinforcement length for both walls is 12 ft (3.66 m), which is 0.6 times the combined height of both walls. For this particular example, constructing a tiered wall versus a single wall 20 ft (6.10 m) high (i.e., J = 0) reduces the global factor of safety from 1.3 to 1.2. From the ICS analysis, a tiered wall has better safety factors and the stability is increased when the distance between tiers is increased.
Soil Reinforcement—Generally speaking, increasing the spacing between reinforcement layers increases the potential for compound failures. Shortening the length of the reinforcement will also increase the potential for both compound and deep-seated failure. Changes in the design strength of the reinforcement often have the smallest impact on the global stability.
CONCLUSIONS
The global stability analysis (deep-seated and compound) of an SRW is an important consideration during the SRW design stage in order to assess the overall wall performance and the coherence of the system. Whenever the structure is influenced by weak soils, ground water tables, slopes at the top or toe of the structure or seismic conditions, an experienced professional should verify that all possible failure conditions have been evaluated.
When the global factor of safety of an SRW is below the design requirement, stability may be increased by increasing the reinforcement length or strength, or by decreasing the space between reinforcement layers. If the changes on the internal structure of the SRW do not improve the factors of safety, soil characteristics can be improved, water can be addressed with appropriate management and geometry can be modified.
When designing SRWs with these conditions, it is important to maintain the coordination among the appropriate professionals to help ensure the success of the job. Consideration must also be given to the impact that each variable has on the SRW stability:
- Increasing the foundation, reinforced and/or retained soil shear strength (using ground improvement techniques or changing soil type).
- Adding external and internal drainage features reduces surcharges and improves soil properties.
- When a slope occurs at the toe of a wall, changing the geometry of the wall slope may also increase stability. For example, placing the SRW at the bottom of the slope and having a slope above the wall instead may increase the stability to an acceptable level.
- A change in the toe slope has a more drastic effect on FSglobal than does a change in the slope above the wall.
- An increase in the slope above the wall reduces the ICS safety factor more than the global stability safety factor.
Global stability analysis is a complex analytical procedure. However, computer software is available which greatly reduces the time required for the analysis.
NOTATIONS:
b = width of slice, ft (m)
c = cohesion of soil, psf (MPa)
FS = factor of safety
FSglobal = global factor of safety
FSICS = ICS factor of safety
FS(reinforced) = the reinforced factor of safety of the soil
FS(unreinforced) = unreinforced factor of safety of the soil
H = total height of wall, ft (m)
Hext = height of back of reinforced wall over which the active earth pressure for external stability is calculated, ft (m)
H1 = height of lower wall for tiered SRWs, ft (m)
H2 = exposed height of upper wall for tiered SRW, ft (m)
J = setback between SRW tiers, ft (m)
L = length of geosynthetic soil reinforcement, ft (m)
MR(reinforcement) = the resisting moment generated by the reinforcement layers that intercept the slip surface
MR(facing) = the resisting contribution of the facing at the exit of the potential slip circle.
MDRIVING = the driving force generated by the weight and surcharges present on the potential slip circle.
N = total normal force, N = N’ + ul, lb/ft (N/m)
N’ = effective normal force, lb/ft (N/m)
P = external load, lb/ft (kN/m)
ql = soil surcharge, lb/ft² (N/m²)
R = radius of the circular slip failure, ft (m)
S = ratio of horizontal offset to vertical rise between tiers of slope
W = total weight of soil in slice plus surcharge if present, lb/ ft (N/m)
X1 = length of influence zone for upper tier, ft (m)
αe = orientation of the critical Coulomb failure surface
β = soil slope above top of wall, degrees
γ = soil unit weight, pcf (kN/m³)
θ = toe angle, degrees
Φ = friction angle of soil, degrees
τavailable = maximum shear strength possessed by the soil on the trial failure surface plus contributions from soil reinforcement, lb/ft (N/m)
τmobilized = shear resistance necessary for equilibrium, lb/ft (N/m)
REFERENCES
- ReSSA 1.0, ADAMA Engineering Inc., 2001.
- SRWall 4.0, Concrete Masonry & Hardscapes Association, 2009.
- CMHA Design Manual for Segmental Retaining Walls, 3rd edition. SRW-MAN-001-10, Concrete Masonry & Hardscapes Association, 2010.
- McCarthy, David F. Essentials of Soil Mechanics and Foundations: Basic Geotechnics, Fourth Edition, Regents/ Prentice Hall, 1993.